
It’s fairly obvious that helicopters develop lift from their spinning rotor blades, but how are helicopters controlled? The pilot has four basic controls, much like an airplane; aileron and elevator (often called cyclic on a helicopter), rudder, and throttle/collective.
The cyclic controls (aileron and elevator) cause the helicopter to tilt left, right, forward and backward. This is achieved by changing the pitch of the blades as they rotate. Imagine increasing the blade pitch (and therefore lift) when the blade is at the rear of the helicopter, and decreasing it when it’s toward the front of the helicopter, constantly changing pitch through each rotation. You might imagine that the increased lift in the rear and decreased lift in the front would cause the machine to tip forward. Although this is good for conceptual purposes, it’s not what really happens. The spinning rotorblades actually create a gyroscope, and when you put a force on a gyroscope, it tilts in a direction 90 degrees from the direction the force was applied. Because of this, the blade pitch needs to be increased and decreased 90 degrees in advance of where you might initially think. In the example above where the pitch in increased when at the rear of the helicopter, the machine would actually tilt left or right depending on whether the blades rotated clockwise or counterclockwise.
The blade pitch is controlled by the swashplate. The swashplate is actually two plates connected by a bearing that the main shaft goes through. The bottom of the swashplate is tilted by pilot controls (or servos in a model). The top plate rotates at the same speed as the blades and in a simple system, is attached to the leading or trailing edge of each main blade with a linkage. As the plate is tipped forward, this linkage increases and decreases the blade pitch when the blade is at the left and right sides of the helicopter and through the magic of the gyroscopic effect, the helicopter pitches forward.
Some models are built using this simple system, but is has it’s drawbacks. The main drawback is that a small amount of pitch change can pitch the machine very quickly. For model helicopters, it is often too quickly, makingthe model difficult or impossible to fly.
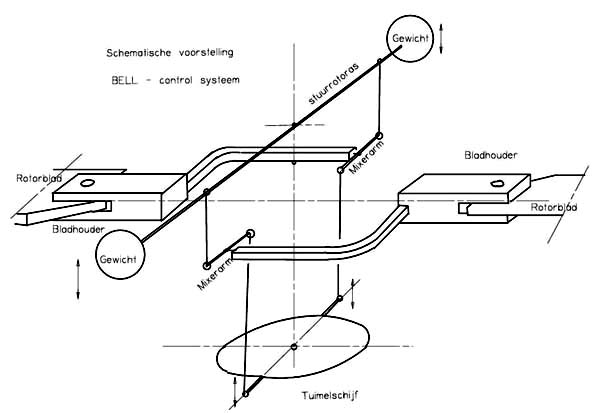
Bell (of Bell Helicopters) solved this stabalization problem by adding a stabilizer bar perpendicular to the main rotor blades with weights at each end. When spinning with the main blades, this weighted bar created another gyroscope that wanted to stay spinning in it’s own independent plane. The tilt of this stabilizer bar was mechanically mixed with the output from the swashplate (the pilot’s control input) to control the pitch of the main blades. Now, when the pilot gave an input to pitch forward, the input would go through the swashplate to the main blades and immediately pitch the main rotorblade plane forward. The stabalizer bar, however, would prefer to stay in the plane it was spinning in, so it would lag behind the main rotorblade plane. This difference between the main rotorblade plane and the stabilizer bar plane would, through the mechanical linkage, decrease the input to the main rotorblade pitch counteracting the input provided directly from the pilot. Thus the roll rate was stabilized.
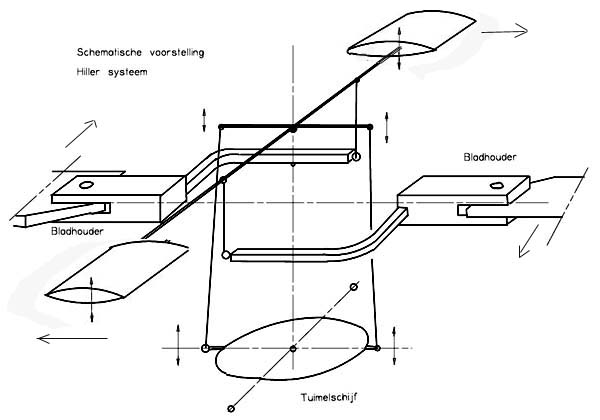
Another method of stabilization was invented by Hiller. The Hiller system also has a bar perpendicular to the main rotorblades, but instead of weights on the ends, it had small wings (usually called paddles). Instead of the input from swashplate controlling the pitch of the main blades, it instead controls the pitch of the paddles. Because the paddles have less area than the main blades, they require less force to control. The tilt of the paddles (not the pitch) are then coupled to the pitch of the main blades. Like the Bell system, this system acts as a stabilizing system for the pitch of the main blades. At the same time, they act as a force amplifcation system since the inputs from the swashplate control only the pitch of the paddles and the tilt of the bar control the pitch of the main blades. This system is used in the simpler fixed pitch micro helicopters. It’s drawback is that it isn’t as responsive as controlling the pitch of the main blades directly since the stabilizer bar has to create lift and tilt before the pitch of the main blades is changed, consequently tilting the rotor disk, hence tilting the helicopter.
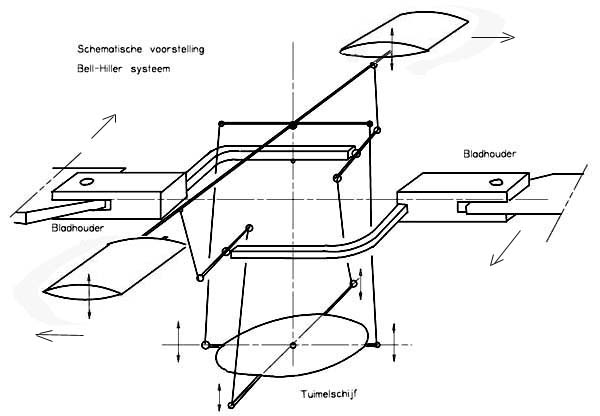
Finally, the most commonly used rotor head system used in model helicopters is a mixture of the Bell system and the Hiller system, hence the name Bell-Hiller. This system uses the Hiller stabilizer bar with paddles on the end. The pitch of these paddles is controlled by a linkage from the swashplate like the Hiller system. There is also a linkage from the tilt of the stabilizer bar to the pitch of the main blades. There is also, however, a linkage from the swashplate directly to the pitch of the main blades. The two inputs to the pitch of the main blades (directly from the swashplate and from the tilt of the stabilizer bar) are mixed using a mechanical mixer, usually mounted on the blade itself. As it turns out, the inputs directly from the swashplate are taken off the top of the swashplate at positions 90 degrees from the inputs that go to the pitch of the paddles, so the top of the swashplate has four take off points rather than two. With this system, when the swashplate tilts, the direct link from the swashplate to the main blade mixer causes an immediate pitch change in the main blades which causes an immediate tilt of the helicopter. The pitch of the stabilizer bar paddles is also controlled by the tilt of the swashplate, which independently causes the stabilizer bar disk to tilt, but at a more controlable rate. When the main rotor disk gets ahead of the stabilizer disk, the mixing between the two reduces the pitch in the main rotor so that the main rotor disk can’t continue tilting any faster than the stabilizer disk does. So ultimately, you get fast response and a controllable roll rate, just what we want.
